
Essua

LIDAR

Lidar_egomotion

Rui Azevedo_sensor_fusion
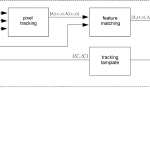
Visual_odometry

ackermann

ackermann_2

aft_collision

aftcollision

atlarcar_sidewayscollision

atlas_robot

atlascar

axescar

colisioncone_fiorini

colliding

corsa

cruzamento_opposite

cruzamento_same

forbidenvel1

forbidenvel2

frames

frontCollision

front_collision

front_collision_rvizz
intersection_opposite
intersection_same

passby

passby2

passby_1

passby_2

passby_3

passby_4

passby_full

rotating

rviz

sideways_bigerradius

sideways_smallerradius

target_tailcollision_detection

turning_static

turning_static_error
 Essua
Essua
 LIDAR
LIDAR
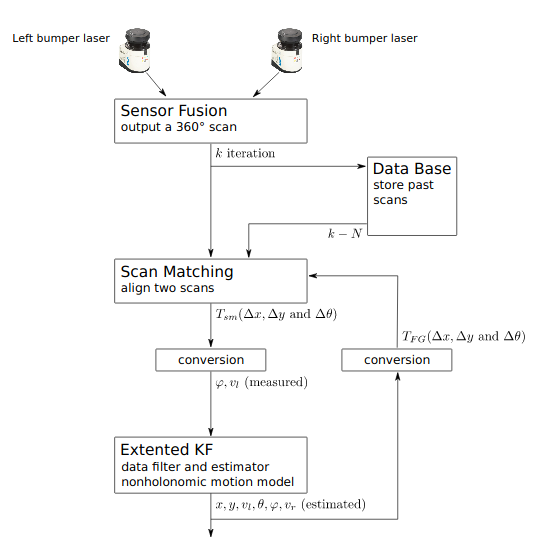 Lidar_egomotion
Lidar_egomotion
 Rui Azevedo_sensor_fusion
Rui Azevedo_sensor_fusion
 Visual_odometry
Visual_odometry
 ackermann
ackermann
 ackermann_2
ackermann_2
 aft_collision
aft_collision
 aftcollision
aftcollision
 atlarcar_sidewayscollision
atlarcar_sidewayscollision
 atlas_robot
atlas_robot
 atlascar
atlascar
 axescar
axescar
 colisioncone_fiorini
colisioncone_fiorini
 colliding
colliding
 corsa
corsa
 cruzamento_opposite
cruzamento_opposite
 cruzamento_same
cruzamento_same
 forbidenvel1
forbidenvel1
 forbidenvel2
forbidenvel2
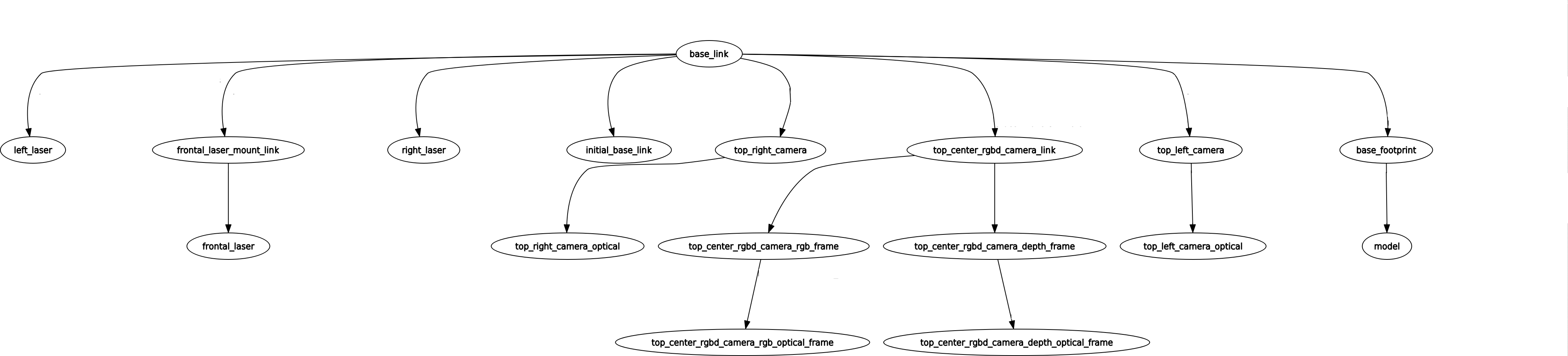 frames
frames
 frontCollision
frontCollision
 front_collision
front_collision
 front_collision_rvizz
front_collision_rvizz
 intersection_opposite
intersection_opposite
 intersection_same
intersection_same
 passby
passby
 passby2
passby2
 passby_1
passby_1
 passby_2
passby_2
 passby_3
passby_3
 passby_4
passby_4
 passby_full
passby_full
 rotating
rotating
 rviz
rviz
 sideways_bigerradius
sideways_bigerradius
 sideways_smallerradius
sideways_smallerradius
 target_tailcollision_detection
target_tailcollision_detection
 turning_static
turning_static
 turning_static_error
turning_static_error